-
Notifications
You must be signed in to change notification settings - Fork 25
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Merge remote-tracking branch 'github/master' into interrupt
- Loading branch information
Showing
7 changed files
with
409 additions
and
21 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,32 @@ | ||
| # .readthedocs.yaml | ||
| # Read the Docs configuration file | ||
| # See https://docs.readthedocs.io/en/stable/config-file/v2.html for details | ||
|
|
||
| # Required | ||
| version: 2 | ||
|
|
||
| # Set the OS, Python version and other tools you might need | ||
| build: | ||
| os: ubuntu-22.04 | ||
| tools: | ||
| python: "3.12" | ||
| # You can also specify other tool versions: | ||
| # nodejs: "19" | ||
| # rust: "1.64" | ||
| # golang: "1.19" | ||
|
|
||
| # Build documentation in the "docs/" directory with Sphinx | ||
| sphinx: | ||
| configuration: source/conf.py | ||
|
|
||
| # Optionally build your docs in additional formats such as PDF and ePub | ||
| # formats: | ||
| # - epub | ||
|
|
||
| # Optional but recommended, declare the Python requirements required | ||
| # to build your documentation | ||
| # See https://docs.readthedocs.io/en/stable/guides/reproducible-builds.html | ||
| python: | ||
| install: | ||
| - requirements: source/requirements.txt |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,232 @@ | ||
| # 概述 | ||
|
|
||
| 蓝牙BLE Host测试需要过认证,传统的方式就是人工打开PTS软件,选择需要认证的case,验证通过就行,这样操作简单直接。 | ||
|
|
||
| 但是PTS测试需要设备配置不同的参数,如配置不同的GATT Service,配对模式等。也就是说跑不同的case,需要根据不同的case写不同的Application,如果这个工作只进行一次还好,但是SPEC一直在演进,协议栈也会一直迭代,认证的流程需要进行多次,继续用人工的方式不仅仅容易出错,工作量还特别大。 | ||
|
|
||
| PTS本身提供了,auto的支持,可以通过其提供的接口来实现自动完成PTS的认证工作。 | ||
|
|
||
|  | ||
|
|
||
|
|
||
|
|
||
| 既然是自动的,肯定有一套协议来控制协议栈来做不同的动作,设备端只要实现这套协议即可,就可以实现Auto-PTS测试功能。但是PTS提供的接口是一个COM库 (Component Object Model)的API接口,这些API接口是完成和PTS软件进行交互的,并不适合直接将这些接口转发到设备端,所以就需要一个转换接口,将这些API转化为设备好处理的协议。 | ||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
| # auto-pts开源项目介绍 | ||
|
|
||
| 直接去看官方的文档,将COM API转成设备好处理协议工作量很大,网上有开源的auto-pts项目([GitHub - auto-pts/auto-pts: The Bluetooth PTS automation framework](https://github.com/auto-pts/auto-pts)),里面有BlueZ、Zephyr和Mynewt的实现。 | ||
|
|
||
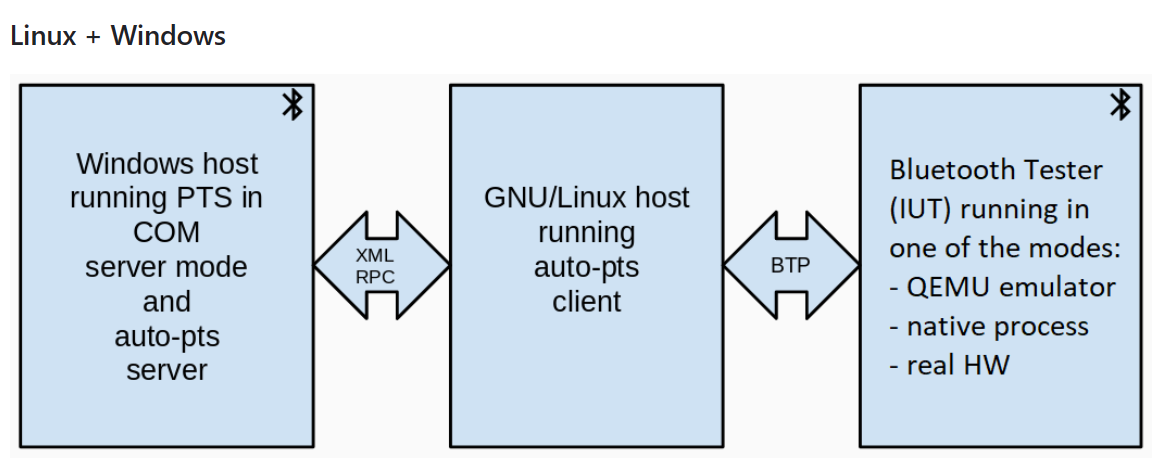
| 该项目实现了官方COM接口,并提供了BTP(Bluetooth Test Protocol) 协议接口,该接口类似于HCI接口格式,设备可以很好的对这些数据进行处理(相关协议说明在项目的doc目录下,[auto-pts/doc at master · auto-pts/auto-pts · GitHub](https://github.com/auto-pts/auto-pts/tree/master/doc))。 | ||
|
|
||
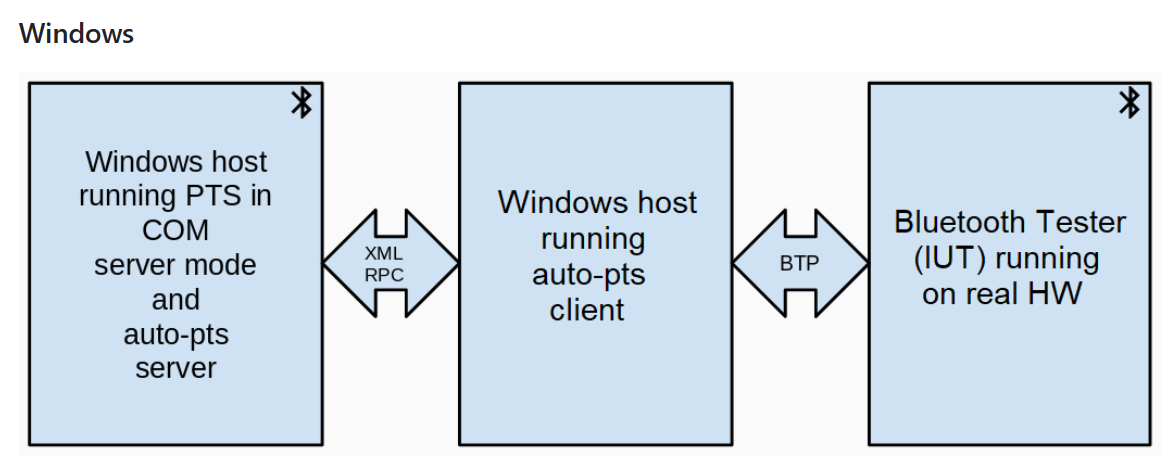
| 其支持Linux和Windows模式,但是由于PTS只支持Windows模式,如果设备端是Linux环境的话,需要Windows(PTS)+Linux(设备),然后通过RPC接口进行通信。 | ||
|
|
||
|  | ||
|
|
||
|  | ||
|
|
||
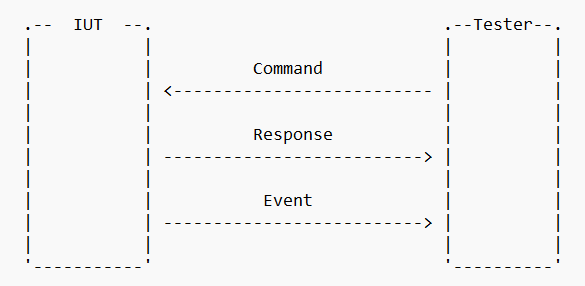
| 其交互主要包含Command、Response和Event三种数据报文格式。 | ||
|
|
||
|  | ||
|
|
||
| 每笔包的数据包格式如下说是,Header有5个字节,后面加具体的Payload内容。 | ||
|
|
||
| 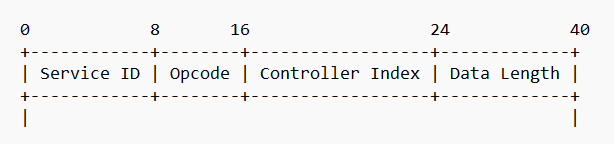 | ||
|
|
||
| 目前Auto-Pts项目支持如下的Service ID,从下图可以看出,目前该项目只支持BLE相关的测试例程,如果是双模设备需要过认证,就得自己参考该项目,将官方的COM API转成新的Service ID的BTP格式(自己实现)。 | ||
|
|
||
|  | ||
|
|
||
|
|
||
|
|
||
| # Zephyr_polling工作 | ||
|
|
||
| 如上述沟通,要实现Auto-PTS功能,设备端只需要实现BTP相关协议即可。然后物理接口再在Auto-PTS设计实现,参考已有的BlueZ、Zephyr和Mynewt的实现来做即可。 | ||
|
|
||
| Zephyr_polling参考的是Zephyr项目,可以先参考官方的文档[AutoPTS on Windows 10 with nRF52 board — Zephyr Project Documentation](https://docs.zephyrproject.org/latest/connectivity/bluetooth/autopts/autopts-win10.html)。 | ||
|
|
||
| Zephyr的Auto-PTS实现在(zephyr/tests/bluetooth/tester/)目录下,支持BTP packets 的收发,用nordic的板子,就可直接用于auto pts 的测试。 | ||
|
|
||
| Zephyr_polling就是将Zephyr这块代码直接搬过来了。然后通过UART和PC进行BTP交互,Auto-PTS全用github的就行。 | ||
|
|
||
| 相关项目代码已提交:[GitHub - bobwenstudy/RTT_PACKAGE_zephyr_polling: 专用于rtthread package的分支](https://github.com/bobwenstudy/RTT_PACKAGE_zephyr_polling),代码在example/tester目录下,目前还有些bug。 | ||
|
|
||
|
|
||
|
|
||
| # Artpi运行实现 | ||
|
|
||
|
|
||
|
|
||
| ## 硬件准备 | ||
|
|
||
| 运行Auto-PTS需要2个硬件设备,一个是待测设备(也就是Artpi),一个是PTS Dongle。 | ||
|
|
||
| ### PTS Dongle | ||
|
|
||
| [Bluetooth SIG](https://store.bluetooth.com/) | ||
|
|
||
|  | ||
|
|
||
| ### ArtPi | ||
|
|
||
| 另外一个就是Artpi了,官网是:[ART-Pi (gitee.io)](https://art-pi.gitee.io/website/) | ||
|
|
||
| 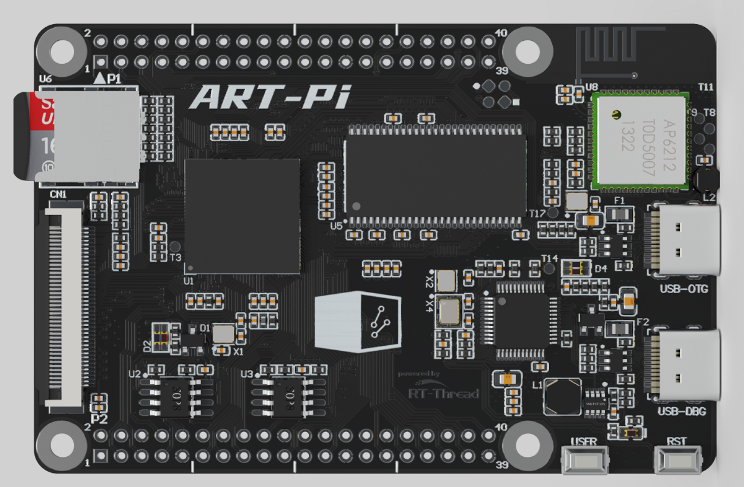 | ||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
| ## auto-pts环境安装 | ||
|
|
||
| 1. 首先从 https://github.com/auto-pts/auto-pts 安装工程 | ||
|
|
||
| 2. 安装python依赖 | ||
|
|
||
| python -m pip install --user wheel | ||
| python -m pip install --user -r autoptsserver_requirements.txt | ||
| python -m pip install --user -r autoptsclient_requirements.txt | ||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
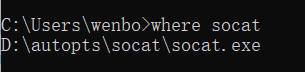
| ## socat安装 | ||
|
|
||
| 下载网址:[Unix Utils ported to Windows - Browse /socat/1.7.3.2 at SourceForge.net](https://sourceforge.net/projects/unix-utils/files/socat/1.7.3.2/) | ||
| Auto-pts 通过socat 进行PC 与IUT 之间的交互。 | ||
| 进入网站下载并解压指定软件压缩包,并将socat.exe 所在目录路径添加至环境变量。 | ||
|
|
||
| 确保`where socat`可以找到。 | ||
|
|
||
|
|
||
|
|
||
|  | ||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
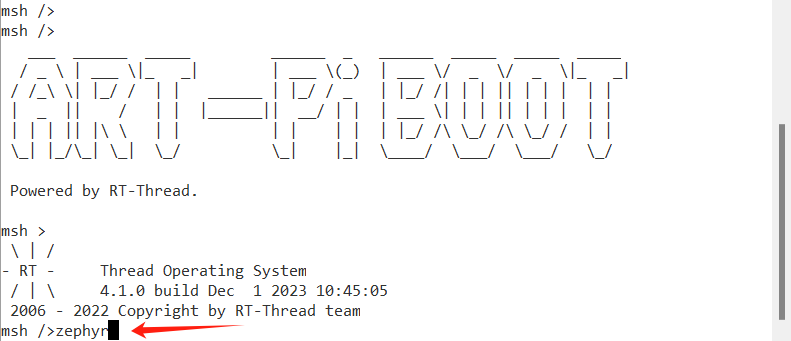
| ## Artpi-Zephyr_polling环境安装 | ||
|
|
||
| 参考该文章,搭建RTT的Artpi环境。[zephyr_polling rtthread移植平台说明_zephyr 移植-CSDN博客](https://blog.csdn.net/wenbo13579/article/details/129755818)。 | ||
|
|
||
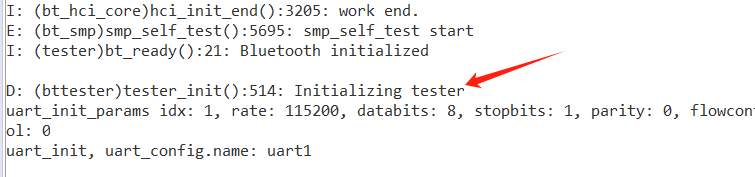
| 目前代码还有问题,通路通了。直接将tester目录下的代码替换到beacon中,然后运行例程,输入zephyr,启动程序。 | ||
|
|
||
|
|
||
|
|
||
|  | ||
|
|
||
| 其中Uart1作为和PC的BTP交互通道。 | ||
|
|
||
|  | ||
|
|
||
| 也就是下图的这两个IO口。 | ||
|
|
||
| 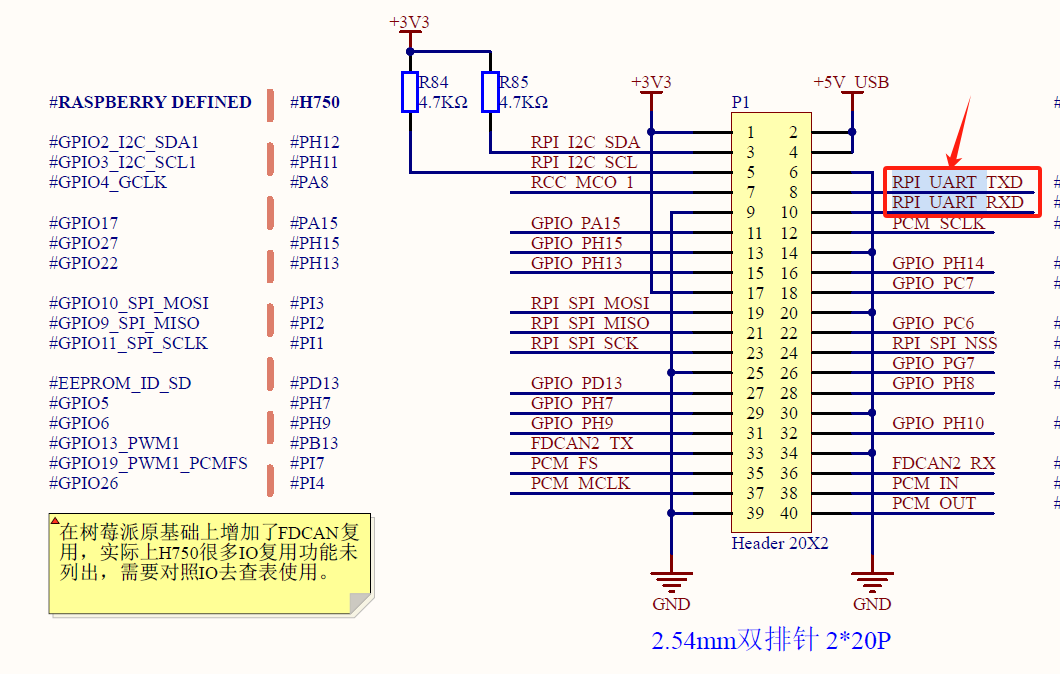 | ||
|
|
||
| 也就是板子的这个位置。 | ||
|
|
||
| 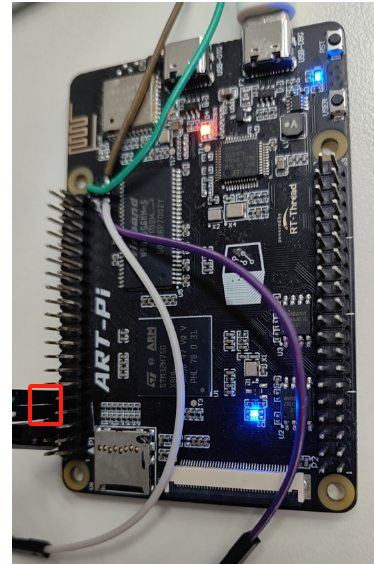 | ||
|
|
||
|
|
||
|
|
||
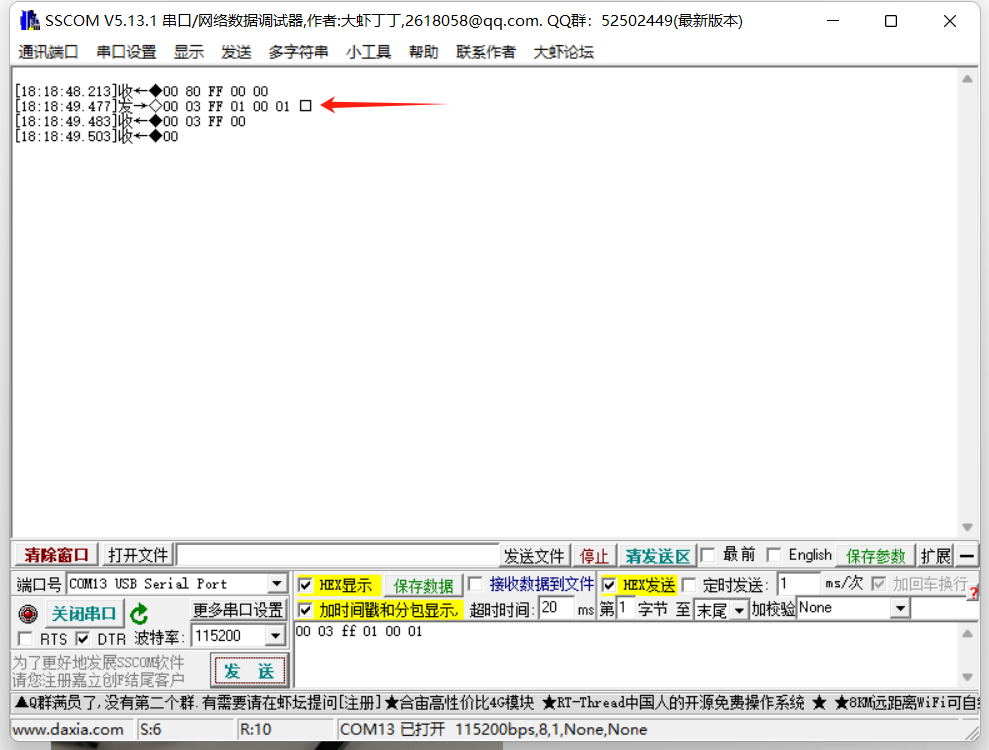
| 这时通过串口工具,就可以和设备进行BTP交互了。 | ||
|
|
||
| 设备刚上电会上报<00 80 FF 00 00>,注意,这里每次case运行的时候都必须上报。不然auto-pts不会继续运行。 | ||
|
|
||
| 测试发送<00 03 ff 01 00 01>,看设备是否能正常回复<00 03 FF 00 00>,这里通了代表硬件和软件代码ready。 | ||
|
|
||
|  | ||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
| ## auto-pts运行 | ||
|
|
||
| ### 启动auto-pts server | ||
|
|
||
| 将PTS Dongle接入PC,通过sscom确认其串口号。 | ||
|
|
||
|  | ||
|
|
||
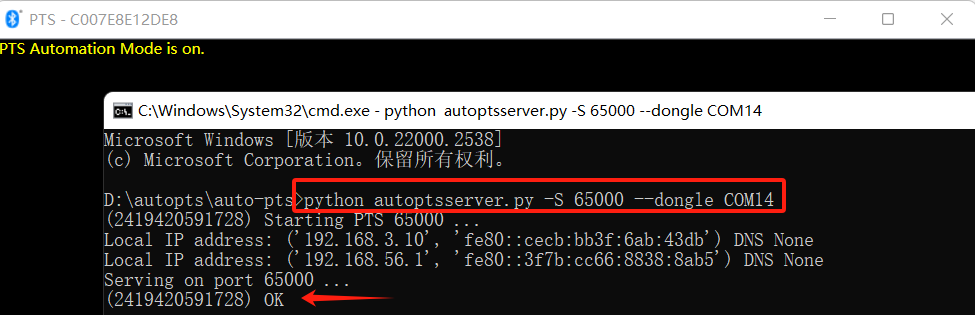
| 而后直接在拉取的auto-pts工程下输入,注意调整串口号,这里是COM14。 | ||
|
|
||
| ``` | ||
| python autoptsserver.py -S 65000 --dongle COM14 | ||
| ``` | ||
|
|
||
| 看到如下显示就是ok了。 | ||
|
|
||
| 注意,这里因为要运行PTS,所以必须要有Sig账号,如果没登录过,这里会提示登录。 | ||
|
|
||
|  | ||
|
|
||
|
|
||
|
|
||
| ### 启动auto-pts client | ||
|
|
||
| 接着就是要启动IUT设备了,这里直接使用Zephyr的工程,因为其本身就是串口,而且串口交互的就是BTP帧格式,只要串口参数配置对了,直接就可以用Zephyr的工程跑了。 | ||
|
|
||
| 接入Artpi,如下图所示,COM12是Debug口,COM13是引出来和Auto-PTS通信的uart1口。 | ||
|
|
||
|  | ||
|
|
||
|
|
||
|
|
||
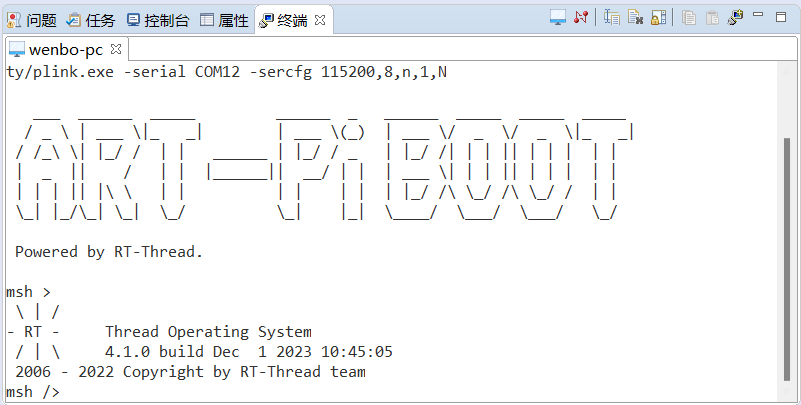
| 用RTT的终端接入COM12作为调试口,需要注意,这里暂时别输入zephyr,启动蓝牙。 | ||
|
|
||
| 因为Auto-PTS要求每次运行Case前,需要设备先上报一个Event<00 80 FF 00 00>,该命令是程序一启动就自动上报,且只上报一次。 | ||
|
|
||
| Zephyr项目通过指定board(-b nrf52)来知道如何该板子是什么,然后通过Jlink下发Reset命令,这里暂时通过手动操作来解决。 | ||
|
|
||
|  | ||
|
|
||
|
|
||
|
|
||
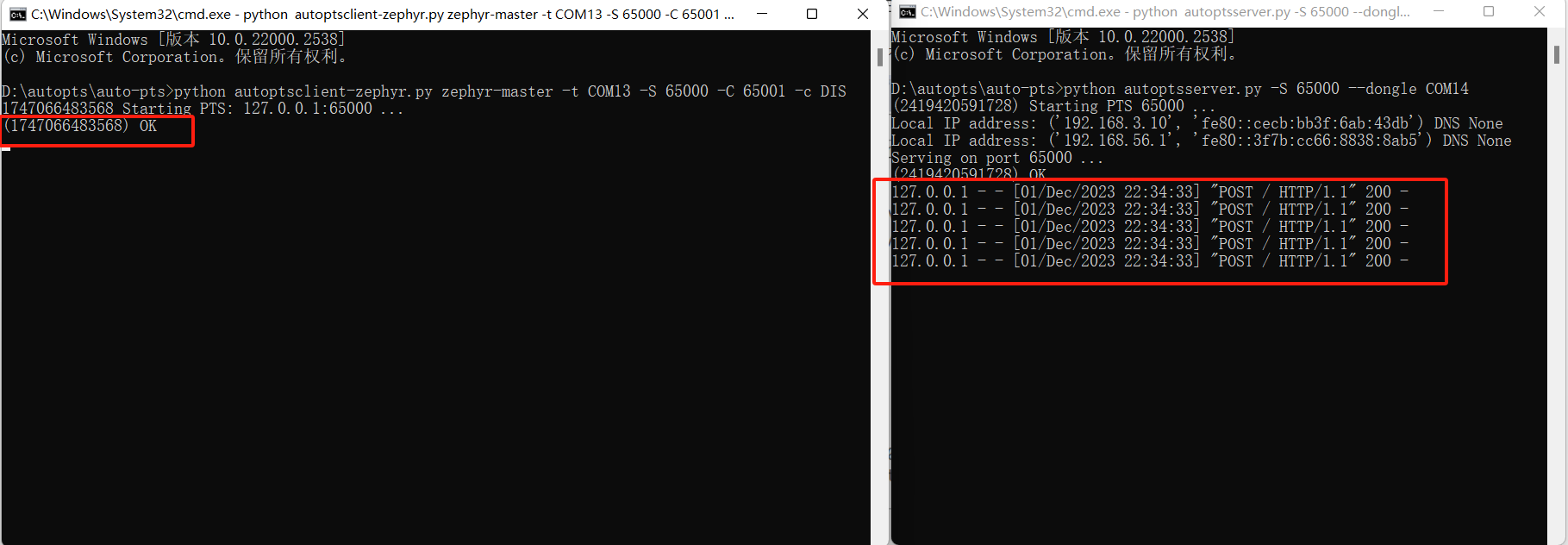
| 而后就运行Auto-PTS的client脚本。命令如下,COM口选13,因为这里只是为了演示需要,所以以简单的DIS相关例程做演示,<-c DIS>指定。 | ||
|
|
||
| ``` | ||
| python autoptsclient-zephyr.py zephyr-master -t COM13 -S 65000 -C 65001 -c DIS | ||
| ``` | ||
|
|
||
| 启动后会看到server终端有HTTPS的提示。 | ||
|
|
||
|  | ||
|
|
||
|
|
||
|
|
||
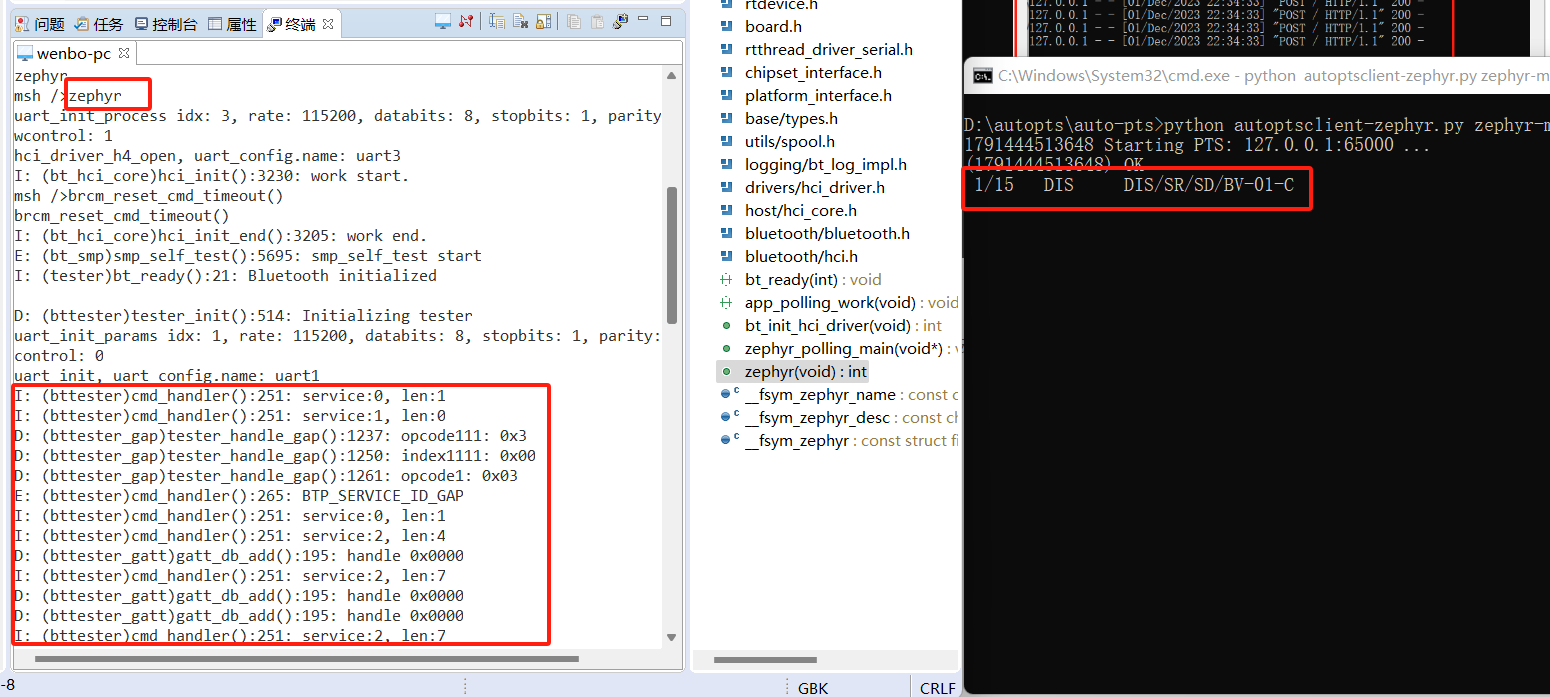
| 然后由于没有做硬件reset,所以需要在case启动后,输入zephyr,启动蓝牙,并上报Event<00 80 FF 00 00>。 | ||
|
|
||
| 之后就能看到日志里打印正常进行BTP通信了。 | ||
|
|
||
|  | ||
|
|
||
|
|
||
|
|
||
| 由于目前还有bug,case都未通过,失败日志可以在auto-pts工程路径下看到。 | ||
|
|
||
|  | ||
|
|
||
|
|
||
|
|
||
| 虽然因为时间仓促,case未运行成功,但是整个通道是打通的,之后按照case要求,解决相关bug即可。 | ||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
|
|
@@ -5,4 +5,5 @@ | |
| :numbered: 2 | ||
|
|
||
| 01_introduce.md | ||
| 02_auto_pts.md | ||
|
|
||
Oops, something went wrong.