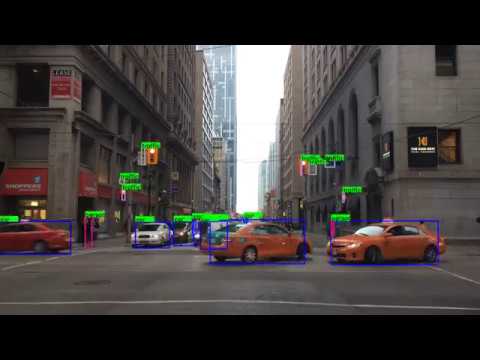
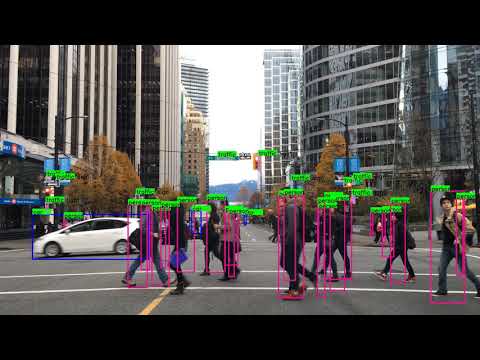
This is a TensorFlow2.0 implementation of the YOLOv1 paper https://arxiv.org/abs/1506.02640, with the following changes,
- The feature exactor resembles the one mentioned in the YOLO9000 paper
- Input size is changed from 448x448 to 608x608
- The output stride is reduced from 64 to 32, to capture smaller objects
- Used 9 boxes per grid location, the paper uses 2. [doing this did not help much]


- Change backbone to the one from YOLO9000
- Use tf.distribute.MirroredStrategy for multi gpu training
- Use tf.data.Dataset to implement the data input pipeline
- Add quantitative results
- Use learning_rate schedule during training
- Add horizonal flip in data input pipeline





- The model was trained on the Berkeley Deep Drive (BDD) dataset, which has 70,000 training images and 10000 validation images
- The model was trained for 200 epochs with a learning_rate of 5e-4 and a batch size of 24 [8 images per gpu] with heavy augmentations [brightness, saturation, contrast]
- No learning_rate schedule was followed (but was used by the authors).