-
Notifications
You must be signed in to change notification settings - Fork 361
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Less restrictive visualizability constraints of 2d entitites, improve…
…d space view generation heuristics (#5188) ### What * Fixes #4926 * it does not address child-of-root heuristics for time series, but they weren't as much of a concern * Fixes heuristic issues observed in rerun-io/cpp-example-opencv-eigen#20 Two changes in here: * we no longer determine the dimensionality of a topological subspace, instead we only determine whether it can't display 2d/3d * 2d: we now state we can _always_ display 2d objects * 3d: we can display it unless the parent of the active subspace is a pinhole in which case we only make the entity _at_ the origin as visualizable * make `ViewCoordinates` add "heuristic hints" to spatial topology * this is all that's needed to get rid of child-of-root heuristics in 3d without regressing existing examples OpenCV example that didn't work before: 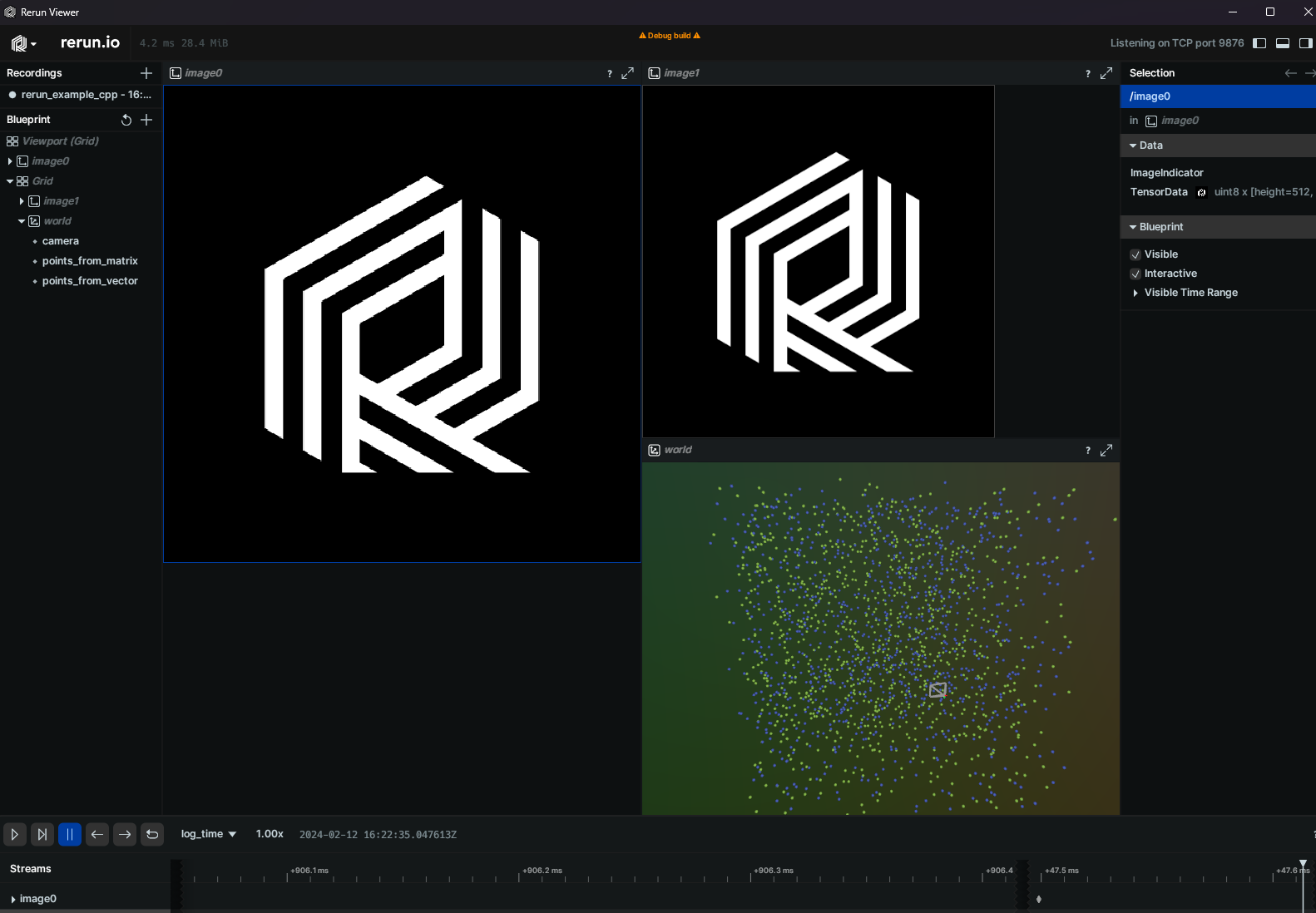 New release check:  ### Checklist * [x] I have read and agree to [Contributor Guide](https://github.com/rerun-io/rerun/blob/main/CONTRIBUTING.md) and the [Code of Conduct](https://github.com/rerun-io/rerun/blob/main/CODE_OF_CONDUCT.md) * [x] I've included a screenshot or gif (if applicable) * [x] I have tested the web demo (if applicable): * Using newly built examples: [app.rerun.io](https://app.rerun.io/pr/5188/index.html) * Using examples from latest `main` build: [app.rerun.io](https://app.rerun.io/pr/5188/index.html?manifest_url=https://app.rerun.io/version/main/examples_manifest.json) * Using full set of examples from `nightly` build: [app.rerun.io](https://app.rerun.io/pr/5188/index.html?manifest_url=https://app.rerun.io/version/nightly/examples_manifest.json) * [x] The PR title and labels are set such as to maximize their usefulness for the next release's CHANGELOG * [x] If applicable, add a new check to the [release checklist](https://github.com/rerun-io/rerun/blob/main/tests/python/release_checklist)! - [PR Build Summary](https://build.rerun.io/pr/5188) - [Docs preview](https://rerun.io/preview/cc3735c02cd092df5843f7fe97bfa998db2e459d/docs) <!--DOCS-PREVIEW--> - [Examples preview](https://rerun.io/preview/cc3735c02cd092df5843f7fe97bfa998db2e459d/examples) <!--EXAMPLES-PREVIEW--> - [Recent benchmark results](https://build.rerun.io/graphs/crates.html) - [Wasm size tracking](https://build.rerun.io/graphs/sizes.html)
- Loading branch information
Showing
6 changed files
with
336 additions
and
371 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Oops, something went wrong.