Пишу эти строки на русском, может прочитав их у кого-то из той страны проснется понимание происходящего:
Указатель направления взрыва.
https://i.postimg.cc/BQF1s44h/Boom1.jpg
{kind=link}
До 24 февраля у нас было все (с. "Не смотри вверх").
Не от хорошей жизни собрал я данное устройство.
У меня не было электиричества, связи и учебника геометрии.
А был ноутбук, Ардуино и взрывы ...
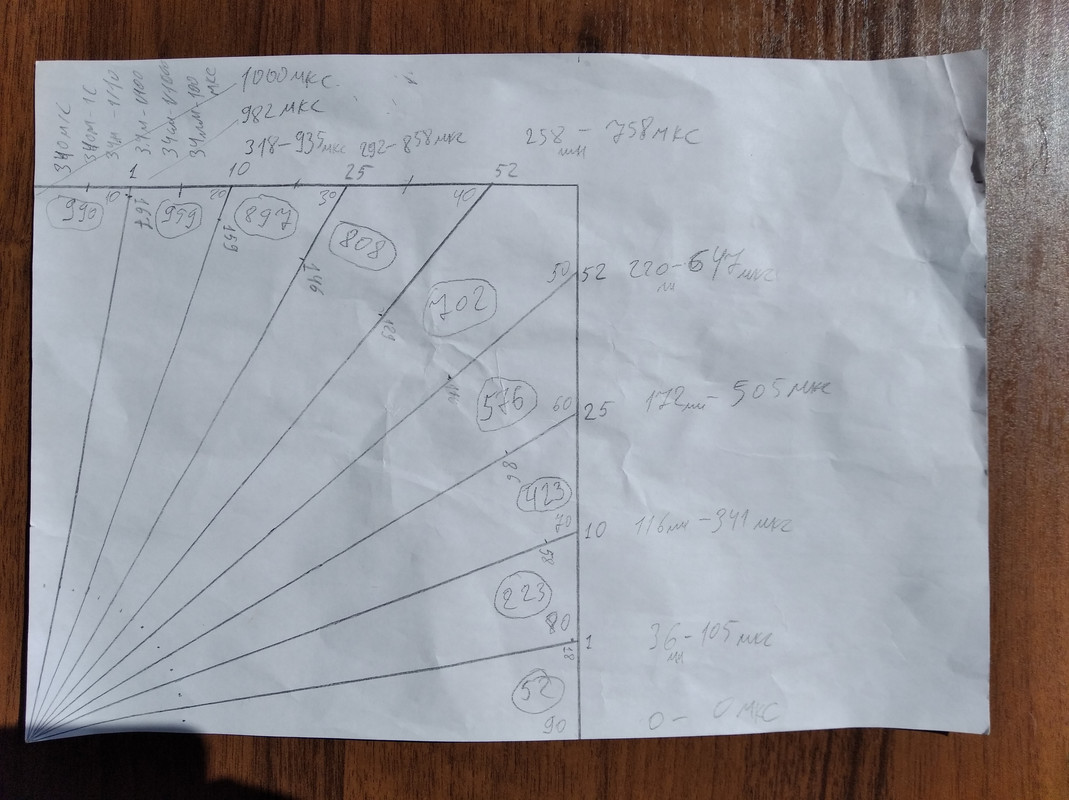
В системе много условностей - что земля плоская, сектор обнаружения - 180 градусов, а скорость звука равна 340м/с.
И еще принималось во внимание, что расстояние до источника на порядки больше базы(340мм) между микрофонами, иначе я не писал-бы эти строки.
https://i.postimg.cc/y6kQzQxf/degree.jpg
{kind=link}
Так с помощью линейки и транспортира я вычислсл задержки сигнала для различных углов с шагом 10 градусов.
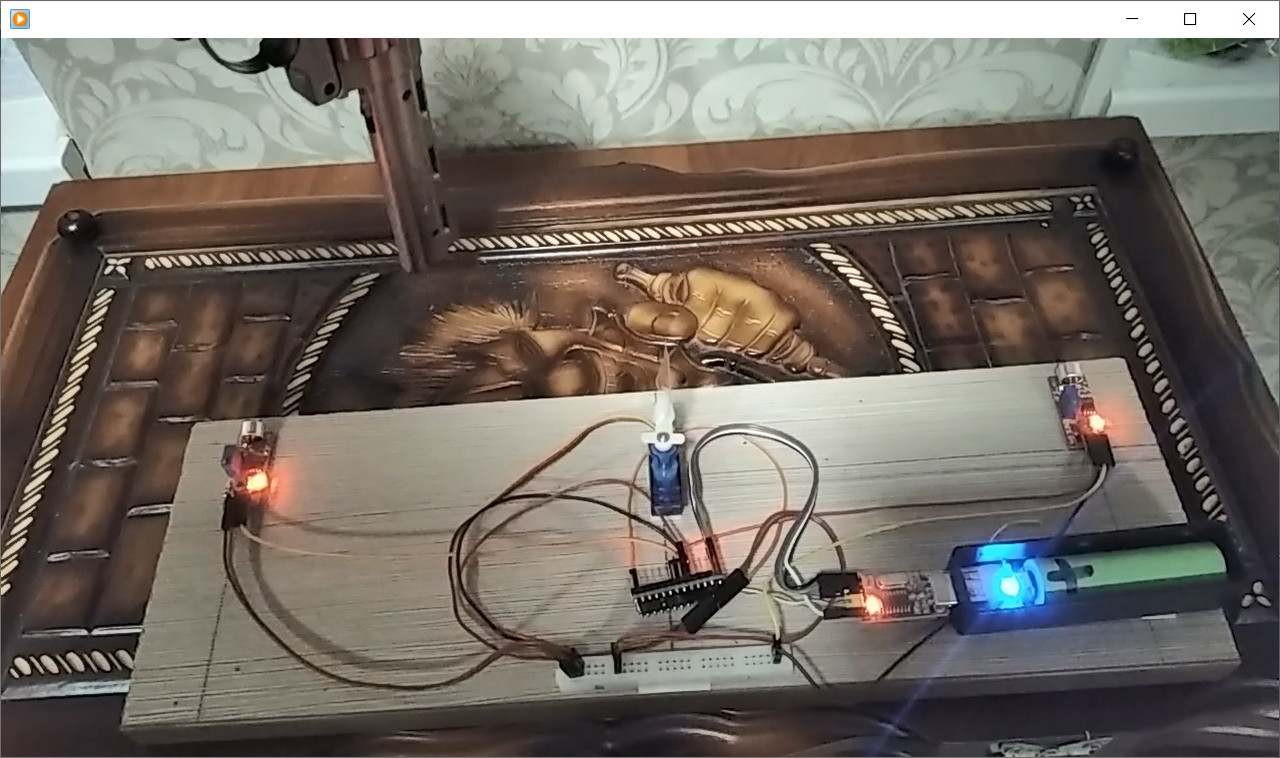
Собственно, устройство - примитив - цифровые выходы датчиков включаются на входы 2(левый) и 3(правый) Ардуино.
Скетч тоже не отличается изяществом, ибо в таких условиях не до красоты кода:
// Point to shoot sound with two microphones (340mm between it) and one serwo, ~10 degree accuracy
#include <Arduino.h>
#include <Servo.h>
Servo myservo; // create servo object to control a servo
int degree; // degree to shoot point
int delta = 0; // delay between microphones
boolean Left = false ; // mark of sound from left side sensor (number 2)
// variables to write interrupts time
volatile unsigned long int time1 = 0;
volatile unsigned long int time2 = 0;
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
// set pins to work with interrupts;
myservo.write(180); //test servo to left
delay(1000);
myservo.write(0); //test servo to right
delay(1000);
myservo.write(90); //test servo to center
delay(1000);
attachInterrupt(0, sensor_1, RISING); //left sensor
attachInterrupt(1, sensor_2, RISING); //right sensor
}
void loop()
{
if ( time1 != 0 && time2 != 0 ) {
if ( time2<time1 ) {delta=time1-time2; Left=true;} //sound from the left
if ( time1<time2 ) {delta=time2-time1; Left=false;} //sound from the right
time1=0;
time2=0;
if ( delta > 0 ) {degree=90;}
if ( delta > 52 ) {degree=80;}
if ( delta > 223 ) {degree=70;}
if ( delta > 423 ) {degree=60;}
if ( delta > 576 ) {degree=50;}
if ( delta > 702 ) {degree=40;}
if ( delta > 808 ) {degree=30;}
if ( delta > 897 ) {degree=20;}
if ( delta > 959 ) {degree=10;}
if ( delta > 990 ) {degree=0;}
if (!Left){degree=180-degree;}
}
myservo.write(degree); // sets the servo position according to the scaled value
delay(333);
}
void sensor_1()
{ if ( time1 == 0 ) { time1 = micros(); } }
void sensor_2()
{ if ( time2 == 0 ) { time2 = micros();} }
Питание схемы - от стабилизированного источника 5В (powerbank). Отладка производится подстроечниками на звуковых сенсорах. При постукивании отверткой посередине между датчиками, сервопривод должен устанавливаться в центральное положение.
https://i.postimg.cc/KjPg2hMk/bereza.jpg
{kind=link}
"Хотят-ли русские войны?" С этого стихотворения обычно начинается урок мира. Очень жаль, что многие его не усвоили...
Arduino pointer to explosion sound
I make this project under enemy fire. Without phone or Internet. But under bomb explosion, when russian soldier shoot civilians.
System use SG-90 servo, Arduino pro mini (or just Arduino) and powered from 5v PowerBank.
Digital pin from left sensor connected to #2 of Arduino, right - to #3.
System tuning comes with adjucting of MIC sensitivity when tapping on miidle between it servo must point to centre.
On russian site i be banned just for verse "Is a russians will war?"