diff --git a/docs/bevezetes/README.md b/docs/bevezetes/README.md
index 45188a9..7c88066 100644
--- a/docs/bevezetes/README.md
+++ b/docs/bevezetes/README.md
@@ -128,44 +128,40 @@ További információ [itt](https://www.youtube.com/szenergyteam).
A Szenergy csapata európa legnagyobb önvezető versenyén, a Shell Eco-marathon Autonomous Urban Concept (AUC) versenyen 2023-ban első, előtte pedig második helyezést ért el. A doboogós helyezések ezekben az évek ben így alakultak:
-| 🏆 | 2022 | 2023 |
-|:---:|---|---|
-| 1. | DTU Road Runners, Technical University of Denmark (`Denmark`) | SZEnergy Team, Széchenyi István University (`Hungary`) |
-| 2. | SZEnergy Team, Széchenyi István University (`Hungary`) | Team EVA, Hogeschool Van Amsterdam University (`Netherlands`) |
-| 3. | DNV Fuel Fighter, Norwegian University of Science And Technology (`Norway`) | H2politO,Molecole Urbane Politecnico Di Torino University (`Italy`) |
+| 🏆 | 2022 | 2023 | 2024 |
+|:---:|---|---|---|
+| 1. | DTU Road Runners, Technical University of Denmark (`Denmark`) | SZEnergy Team, Széchenyi István University (`Hungary`) | SZEnergy Team, Széchenyi István University (`Hungary`) |
+| 2. | SZEnergy Team, Széchenyi István University (`Hungary`) | Team EVA, Hogeschool Van Amsterdam University (`Netherlands`) | H2politO,Molecole Urbane Politecnico Di Torino University (`Italy`) |
+| 3. | DNV Fuel Fighter, Norwegian University of Science And Technology (`Norway`) | H2politO,Molecole Urbane Politecnico Di Torino University (`Italy`) | Team EVA, Hogeschool Van Amsterdam University (`Netherlands`) |
-Forrás: [shellecomarathon.com](https://www.shellecomarathon.com/2023-programme-on-track/autonomous-urban-concept/_jcr_content/root/main/section/simple/link_list_copy/links/item0.stream/1686130984099/008b488668d9f7248319705f60e09fe861737ccd/sem-2023-eu-auc-final-results.pdf)
+Forrás: [shellecomarathon.com](https://www.shellecomarathon.com/about/previous-seasons.html)
+
-## Segway Loomo (robot)
-Leírás [itt](https://github.com/jkk-research/loomo_base).
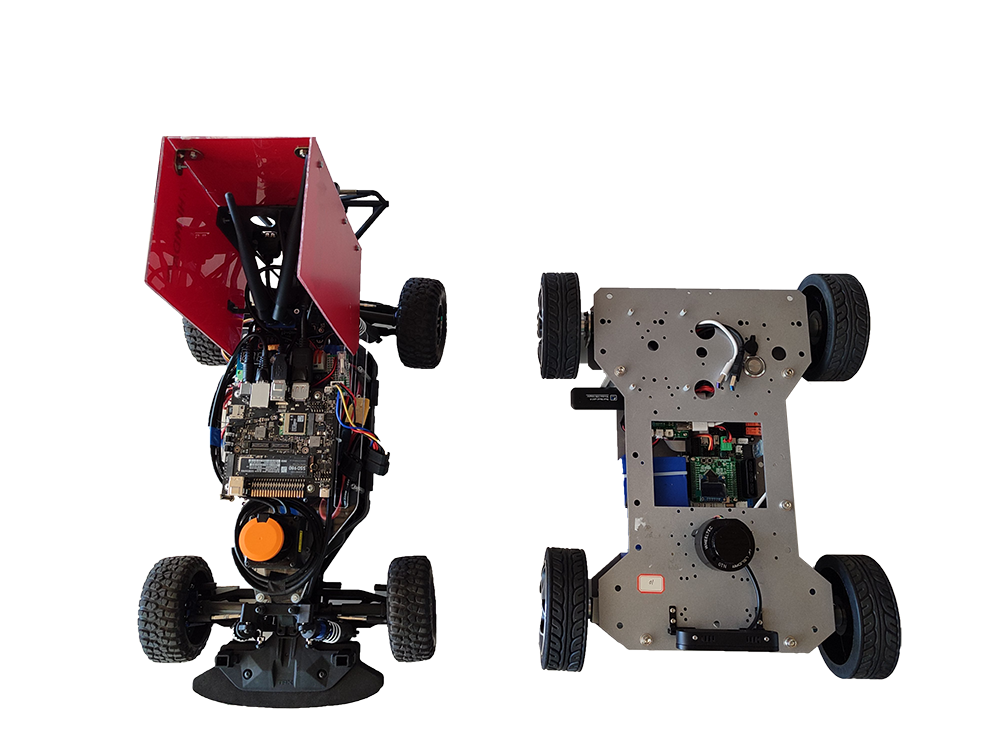
+## F1/10 (Ackermann robot) / Roboworks Rosbot mini Ackermann
+
+Az F1/10 verseny egy autonóm járművekkel kapcsolatos verseny, ahol a résztvevők 1/10-es méretarányú Formula 1-es autómodelleket építenek és programoznak, hogy azok önállóan navigáljanak egy versenypályán. A cél az, hogy a járművek a lehető leggyorsabban és legbiztonságosabban teljesítsék a pályát, miközben elkerülik az akadályokat és a többi autót. A verseny során a résztvevők tesztelhetik robotikai, mesterséges intelligencia és gépi tanulási ismereteiket. A Roboworks robotja az F1/10 jármű méreéhez és szenzorozottságához nagyon hasonló. F1tenth jármű [leírás itt](https://f1tenth.org/build.html).
- { width="40%" }
-
+ 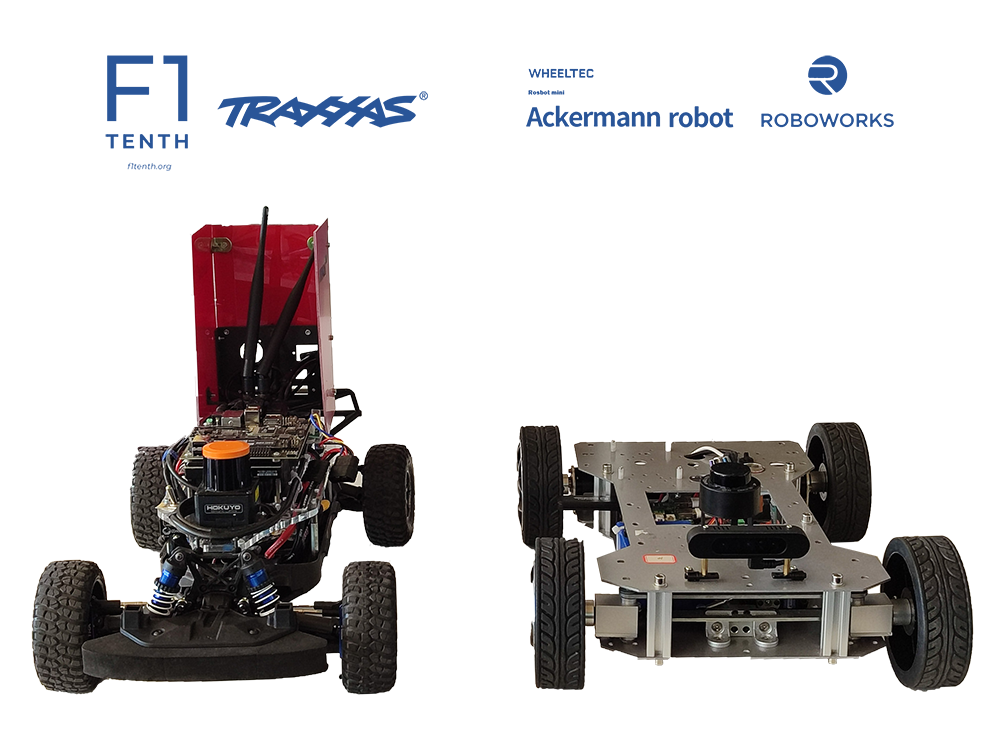{ width="80%" }
-## F1/10 (Ackermann robot)
-
-F1tenth jármű, [leírás itt](https://f1tenth.org/build.html).
-
- { width="80%" }
-
+ { width="80%" }
-_Kép forrása_: Varundev Suresh Babu and Prof. Madhur Behl, Computer Science | Link Lab | University of Virginia
-## Roboworks Rosbot mini Ackermann (robot)
-Leírás [itt](https://robotverseny.github.io/megoldas_zala23/)
+
+
+## Segway Loomo (robot)
+Leírás [itt](https://github.com/jkk-research/loomo_base).
- { width="60%" }
+ { width="40%" }
-
## Husarion ROSbot 2 Pro (robot)
Leírás [itt](https://husarion.com/manuals/rosbot/).
diff --git a/docs/bevezetes/explain_video01.png b/docs/bevezetes/explain_video01.png
index 0a7e83c..22e2427 100644
Binary files a/docs/bevezetes/explain_video01.png and b/docs/bevezetes/explain_video01.png differ
diff --git a/docs/bevezetes/robotaxis01.png b/docs/bevezetes/robotaxis01.png
index 1966ab3..5563f9c 100644
Binary files a/docs/bevezetes/robotaxis01.png and b/docs/bevezetes/robotaxis01.png differ
diff --git a/docs/bevezetes/robots01.png b/docs/bevezetes/robots01.png
index cb4522e..b6a19e9 100644
Binary files a/docs/bevezetes/robots01.png and b/docs/bevezetes/robots01.png differ
diff --git a/docs/bevezetes/vehcile_leaf01.png b/docs/bevezetes/vehcile_leaf01.png
index d2bc522..ae4a62d 100644
Binary files a/docs/bevezetes/vehcile_leaf01.png and b/docs/bevezetes/vehcile_leaf01.png differ
diff --git a/docs/bevezetes/vehcile_lexus01.png b/docs/bevezetes/vehcile_lexus01.png
index b3e221a..9fed594 100644
Binary files a/docs/bevezetes/vehcile_lexus01.png and b/docs/bevezetes/vehcile_lexus01.png differ
diff --git a/docs/bevezetes/vehicle_szenergy01.png b/docs/bevezetes/vehicle_szenergy01.png
index 43de970..42c91c5 100644
Binary files a/docs/bevezetes/vehicle_szenergy01.png and b/docs/bevezetes/vehicle_szenergy01.png differ