diff --git a/docs/eszleles/README.md b/docs/eszleles/README.md
index 78dc0f8..4a3c80d 100644
--- a/docs/eszleles/README.md
+++ b/docs/eszleles/README.md
@@ -87,6 +87,7 @@ Ez a tananyagrész a TU München Autonomous Driving Software Engineering tantár
## Kihívások, nehézségek
Számos kihívás nehezítheti a felismerést illetve annak pontosságát:
+
- Időjárás (eső, hó, köd, ...)
- Napszak (éjszaka, naplemente, napfelkelte ...)
- Takarás (objektumok csak részlegesen látszanak)
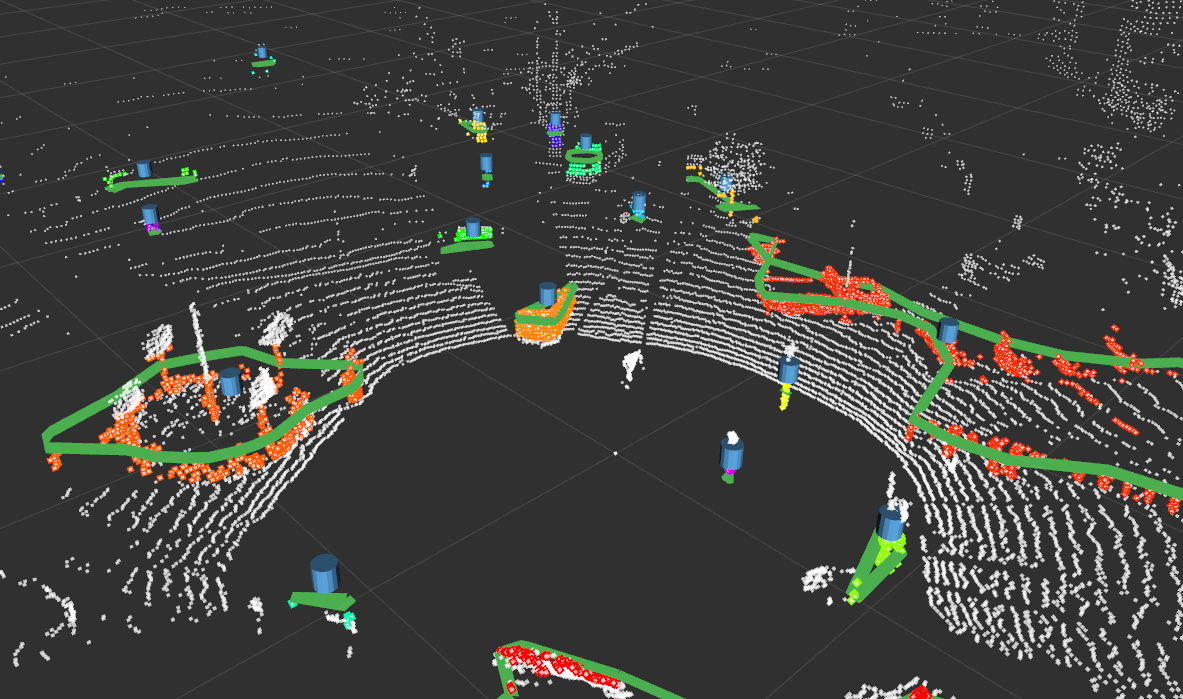
@@ -117,6 +118,10 @@ Miután az út szintjét kiszűrtük a LIDAR adatból (ground-segmentation), út
Forrás: [codeahoy.com](https://codeahoy.com/img/kmeans/kmeans-animated.gif)
+
+
+Forrás: saját
+
## Szenzorfúzió
diff --git a/docs/eszleles/practice_cluster.md b/docs/eszleles/practice_cluster.md
index cae0ffa..c2295b7 100644
--- a/docs/eszleles/practice_cluster.md
+++ b/docs/eszleles/practice_cluster.md
@@ -27,9 +27,9 @@ A következő képernyőfelvétel bemutatja a szükséges lépéseket:
-## `1. lépés.` - Töltsük le a nyers adatokat
+## `1. lépés.` - Ha még nincs meg korábbról, töltsük le a nyers adatokat
-A LIDAR adatok klaszterezéséhez először – nem meglepő módon – LIDAR adatokra van szükség. Használja a következő 3 lehetőség valamelyikét.
+A LIDAR adatok klaszterezéséhez először – nem meglepő módon – LIDAR adatokra van szükség. Használja a következő 3 lehetőség valamelyikét, amennyiben még nincs meg az elsőző gyakorlatokból.
### `A lehetőség`: MCAP letöltése az alábbi linkről
@@ -52,6 +52,11 @@ cd /mnt/c/bag/
```
wget https://laesze-my.sharepoint.com/:u:/g/personal/herno_o365_sze_hu/Eclwzn42FS9GunGay5LPq-EBA6U1dZseBFNDrr6P0MwB2w?download=1 -O lexus3-2024-04-05-gyor.mcap
```
+Tanteremben ez így néz ki:
+``` bash
+rsync -avzh --progress /mnt/kozos/measurement_files/lexus3-2024-04-05-gyor.mcap /mnt/c/temp/
+```
+Windows böngészőből is meg lehet tenni, de a terminálból csak egy parancs.
### `C lehetőség`: Saját MCAP használata
@@ -68,7 +73,7 @@ Később se felejtsük el frissíteni ezeket a további lépésekben.
Játsszuk le a bag-et következőhöz hasonló paranccsal:
``` bash
-ros2 bag play /mnt/c/bag/lexus3-2024-04-05-gyor.mcap -l
+ros2 bag play /mnt/c/temp/lexus3-2024-04-05-gyor.mcap -l
```
!!! info
@@ -151,7 +156,7 @@ git clone https://github.com/jkk-research/lidar_cluster_ros2
```
-### Build the packages
+### Build
```bash
cd ~/ros2_ws
@@ -191,7 +196,7 @@ source ~/ros2_ws/install/setup.bash
```bash
-ros2 bag play /mnt/c/bag/lexus3-2024-04-05-gyor.mcap -l
+ros2 bag play /mnt/c/temp/lexus3-2024-04-05-gyor.mcap -l
```
```bash
diff --git a/docs/index.md b/docs/index.md
index d7f2160..3a9cac3 100644
--- a/docs/index.md
+++ b/docs/index.md
@@ -46,38 +46,53 @@ Oktatók | | | .
-2023/24 őszi félévében az `A2`-es teremben, illetve a `C100`-as gépteremben tartunk órákat.
+2024/25 őszi félévében az `A2`-es teremben (hétfő), illetve a `B6`-as gépteremben (kedd 8:30) tartunk órákat.
+
+Óra | Dátum | Tananyag | Megj.
+-----:|---:|:-----|:-----:
+1 | szept. 9-10. | Bevezetés |
+2 | szept. 16-17. | ROS 2 alap, telepítés |
+3 | szept. 23-24. | Érzékelés |
+4 | szept. 30-okt. 1. | ROS 2 haladó |
+5 | okt. 7-8. | Transzformációk | okt. 13-ig kis beadandó
+6 | okt. 14-15. | Észlelés |
+7 | okt. 21. | Szimuláció | 22-én B6 terem felújítás
+8 | okt. 28-29. | Tervezés | ZH 1
+9 | nov. 4-5. | Szabályozás |
+10 | nov. 11-12. | AI |
++1 | nov. 19.? | | ZH 2?
++2 | - | | Pót ZH?
## Elmélet
-Óra | Dátum | Tananyag
------|-----|-----
-1 | szept. 6. | [Bevezetés](https://sze-info.github.io/ajr/bevezetes/): A tantárgy felépítése. Robotikai és önvezető járműves ismeretek. Érzékelés, észlelés, tervezés, szabályozás, aktuálás.
-2 | szept. 13. | [ROS2 koncepciók](https://sze-info.github.io/ajr/bevezetes/ros2/): Egyetemi robotok és járművek ismertetése. `ROS 2` alapismeretek.
-3 | szept. 20. | [Érzékelés](https://sze-info.github.io/ajr/erzekeles/): Kamera, LIDAR, GNSS (GPS), IMU, CAN szenzorok működése, jelfeldolgozása, főbb `ROS 2` topicok, `ROS 2` időkezelés.
-4 | szept. 27. | [Féléves beadandó](https://sze-info.github.io/ajr/feleves_beadando/): féléves beadandó ismertetése, osztályzási szempontok, ötletek, kérdések-válaszok
-5 | okt. 4. | [Transzformációk](https://sze-info.github.io/ajr/transzformaciok/): Merev test mozgása, mátrix szorzás ismétlése, homogén koordináták szemléltetése rövid progamkódokkal, quaternion (kvaterniók) fogalma.
-6 | okt. 11. | [Észlelés](https://sze-info.github.io/ajr/eszleles/): objektumfelismerés, objektumklasszifikáció, objektum követés és predikció, SLAM és LOAM.
-7 | okt. 25. | [Szimuláció](https://sze-info.github.io/ajr/szimulacio/): ROS 2 kompatibilis szimulátorok áttekintése (pl [Gazebo](http://gazebosim.org/), [Carla](https://carla.org/), [SVL](https://www.lgsvlsimulator.com/), [OSSDC SIM](https://github.com/OSSDC/OSSDC-SIM), [AirSim](https://microsoft.github.io/AirSim), [AWSIM](https://tier4.github.io/AWSIM), [CoppeliaSim](https://www.coppeliarobotics.com/coppeliaSim), [MVSim](https://mvsimulator.readthedocs.io/))
-8 | nov. 8. | [Tervezés](https://sze-info.github.io/ajr/tervezes/): Globális tervezés, lokális tervezés. Lokális tervezés: keresztirányú és hosszirányú tervezés.
-9 | nov. 15. | [Szabályozás](https://sze-info.github.io/ajr/szabalyozas/): Járműirányítási megoldások (inverz-modellek, prediktív modellek, zárhurkú modellek).
-10 | nov. 22. | [Mesterséges intelligencia](https://sze-info.github.io/ajr/mesterseges_intelligencia/): Neurális hálózatok járműves és robotikai fókusszal.
+Óra | Tananyag
+-----|-----
+1 | [Bevezetés](https://sze-info.github.io/ajr/bevezetes/): A tantárgy felépítése. Robotikai és önvezető járműves ismeretek. Érzékelés, észlelés, tervezés, szabályozás, aktuálás.
+2 | [ROS2 koncepciók](https://sze-info.github.io/ajr/bevezetes/ros2/): Egyetemi robotok és járművek ismertetése. `ROS 2` alapismeretek.
+3 | [Érzékelés](https://sze-info.github.io/ajr/erzekeles/): Kamera, LIDAR, GNSS (GPS), IMU, CAN szenzorok működése, jelfeldolgozása, főbb `ROS 2` topicok, `ROS 2` időkezelés.
+4 | [Féléves beadandó](https://sze-info.github.io/ajr/feleves_beadando/): féléves beadandó ismertetése, osztályzási szempontok, ötletek, kérdések-válaszok
+5 | [Transzformációk](https://sze-info.github.io/ajr/transzformaciok/): Merev test mozgása, mátrix szorzás ismétlése, homogén koordináták szemléltetése rövid progamkódokkal, quaternion (kvaterniók) fogalma.
+6 | [Észlelés](https://sze-info.github.io/ajr/eszleles/): objektumfelismerés, objektumklasszifikáció, objektum követés és predikció, SLAM és LOAM.
+7 | [Szimuláció](https://sze-info.github.io/ajr/szimulacio/): ROS 2 kompatibilis szimulátorok áttekintése (pl [Gazebo](http://gazebosim.org/), [Carla](https://carla.org/), [SVL](https://www.lgsvlsimulator.com/), [OSSDC SIM](https://github.com/OSSDC/OSSDC-SIM), [AirSim](https://microsoft.github.io/AirSim), [AWSIM](https://tier4.github.io/AWSIM), [CoppeliaSim](https://www.coppeliarobotics.com/coppeliaSim), [MVSim](https://mvsimulator.readthedocs.io/))
+8 | [Tervezés](https://sze-info.github.io/ajr/tervezes/): Globális tervezés, lokális tervezés. Lokális tervezés: keresztirányú és hosszirányú tervezés.
+9 | [Szabályozás](https://sze-info.github.io/ajr/szabalyozas/): Járműirányítási megoldások (inverz-modellek, prediktív modellek, zárhurkú modellek).
+10 | [Mesterséges intelligencia](https://sze-info.github.io/ajr/mesterseges_intelligencia/): Neurális hálózatok járműves és robotikai fókusszal.
## Gyakorlat
-Óra | Dátum | Tananyag
------|-----|-----
-1| szept. 6. | [Bevezetés](https://sze-info.github.io/ajr/bevezetes/practice/) + [Linux](https://sze-info.github.io/ajr/bevezetes/linux/) + [Géptermi ismeretek](https://sze-info.github.io/ajr/bevezetes/gepterem/): WSL2 használata Windows operációs rendszeren. Géptermi alapismeretek. Linux parancsok, amelyek szükségesek lehetnek a későbbiekben.
-2| szept. 13. | [Telepítés](https://sze-info.github.io/ajr/telepites/ros_humble/)+ [Fejlesztőkörnyezet beállítása](https://sze-info.github.io/ajr/bevezetes/vscodegit/) + [ROS2 kommunikáció](https://sze-info.github.io/ajr/bevezetes/ros2gyak/): Első `ROS 2` node-ok, ROS parancsok használata, build és source.
-3| szept. 20. | [Érzékelés gyakorlat](https://sze-info.github.io/ajr/erzekeles/practice/): Szenzor adatok jellemzőbb formátumai: `sensor_msgs/PointCloud2`, `sensor_msgs/Image`, `geometry_msgs/Pose`, stb. Bag `.mcap` fájlok kezelése, lejátszása. Egyszerű pacakge készítése, amely pozíció adatokra iratkozik fel.
-4| szept. 27. | [Verziókezelés, Git](https://sze-info.github.io/ajr/onallo/ros2git/), [Copilot](https://sze-info.github.io/ajr/bevezetes/copilot/), [vs code](https://sze-info.github.io/ajr/bevezetes/vscodegit/), [ROS 2 launch](https://sze-info.github.io/ajr/ros2halado/ros2launch/): Copilot használata ROS 2 fejlesztéshez, Template repo ismertetése, használata, launch fájlok írása python nyelven
-5| okt. 4. | [Transzformációk gyakorlat](https://sze-info.github.io/ajr/transzformaciok/practice/): Node létrehozása, amely transzformációkat hirdet. Markerek megjelenítése, launch önálló feladat.
-6| okt. 11. | [Észlelés gyakorlat](https://sze-info.github.io/ajr/eszleles/practice/): egyszerű LIDAR szűrés, X, Y és Z koordináták szerint.
-7| okt. 25. | [Szimuláció bevezetés](https://sze-info.github.io/ajr/szimulacio/gazebo_fortress/): Gazebo Fortress és ROS 2, [szimuláció gyakorlat](https://sze-info.github.io/ajr/szimulacio/gyakorlat/): saját robotszimuláció létrehozása.
-8| nov. 8. | [Tervezés gyakorlat](https://sze-info.github.io/ajr/tervezes/practice/): Polinom alapú lokális tervező megvalósításás. [Nav2](https://navigation.ros.org/) használata szimulátorral.
-9| nov. 15. | [Szabályozás gyakorlat](https://sze-info.github.io/ajr/szabalyozas/ros2practice/): PID hangolás. Trajektóriakövetés Gazebo szimulátorral. Saját fejlesztésű szabályzó és jármű modell.
-10| nov. 22. | [Mesterséges intelligencia gyakorlat](https://sze-info.github.io/ajr/mesterseges_intelligencia/practice/): Neurális hálózatok gyakorlat.
+Óra | Tananyag
+-----|-----
+1| [Bevezetés](https://sze-info.github.io/ajr/bevezetes/practice/) + [Linux](https://sze-info.github.io/ajr/bevezetes/linux/) + [Géptermi ismeretek](https://sze-info.github.io/ajr/bevezetes/gepterem/): WSL2 használata Windows operációs rendszeren. Géptermi alapismeretek. Linux parancsok, amelyek szükségesek lehetnek a későbbiekben.
+2| [Telepítés](https://sze-info.github.io/ajr/telepites/ros_humble/)+ [Fejlesztőkörnyezet beállítása](https://sze-info.github.io/ajr/bevezetes/vscodegit/) + [ROS2 kommunikáció](https://sze-info.github.io/ajr/bevezetes/ros2gyak/): Első `ROS 2` node-ok, ROS parancsok használata, build és source.
+3| [Érzékelés gyakorlat](https://sze-info.github.io/ajr/erzekeles/practice/): Szenzor adatok jellemzőbb formátumai: `sensor_msgs/PointCloud2`, `sensor_msgs/Image`, `geometry_msgs/Pose`, stb. Bag `.mcap` fájlok kezelése, lejátszása. Egyszerű pacakge készítése, amely pozíció adatokra iratkozik fel.
+4| [Verziókezelés, Git](https://sze-info.github.io/ajr/onallo/ros2git/), [Copilot](https://sze-info.github.io/ajr/bevezetes/copilot/), [vs code](https://sze-info.github.io/ajr/bevezetes/vscodegit/), [ROS 2 launch](https://sze-info.github.io/ajr/ros2halado/ros2launch/): Copilot használata ROS 2 fejlesztéshez, Template repo ismertetése, használata, launch fájlok írása python nyelven
+5| [Transzformációk gyakorlat](https://sze-info.github.io/ajr/transzformaciok/practice/): Node létrehozása, amely transzformációkat hirdet. Markerek megjelenítése, launch önálló feladat.
+6| [Észlelés gyakorlat](https://sze-info.github.io/ajr/eszleles/practice/): egyszerű LIDAR szűrés, X, Y és Z koordináták szerint.
+7| [Szimuláció bevezetés](https://sze-info.github.io/ajr/szimulacio/gazebo_fortress/): Gazebo Fortress és ROS 2, [szimuláció gyakorlat](https://sze-info.github.io/ajr/szimulacio/gyakorlat/): saját robotszimuláció létrehozása.
+8| [Tervezés gyakorlat](https://sze-info.github.io/ajr/tervezes/practice/): Polinom alapú lokális tervező megvalósításás. [Nav2](https://navigation.ros.org/) használata szimulátorral.
+9| [Szabályozás gyakorlat](https://sze-info.github.io/ajr/szabalyozas/ros2practice/): PID hangolás. Trajektóriakövetés Gazebo szimulátorral. Saját fejlesztésű szabályzó és jármű modell.
+10| [Mesterséges intelligencia gyakorlat](https://sze-info.github.io/ajr/mesterseges_intelligencia/practice/): Neurális hálózatok gyakorlat.
diff --git a/docs/transzformaciok/practice.md b/docs/transzformaciok/practice.md
index a879f94..c04921c 100644
--- a/docs/transzformaciok/practice.md
+++ b/docs/transzformaciok/practice.md
@@ -56,7 +56,7 @@ Ezután már buildelhetünk is:
cd ~/ros2_ws
```
``` bash
-colcon build --packages-select arj_transforms_cpp
+colcon build --packages-select arj_transforms_cpp --symlink-install
```
Célszerű új terminalban source-olni, majd futtatni: