ubuntu 22.04
ros2 humble
need to test first
binary install : for learning moveit
Source build : for creat packages
## make ros2 workspace
mkdir -p ~/[ros2 workspace dir]/src
sudo apt remove ros-$ROS_DISTRO-moveit*
## git moveit2
cd ~/[ros2 workspace dir]/src
git clone -b humble https://github.com/ros-planning/moveit2_tutorials.git
git clone -b humble https://github.com/ros-planning/moveit2.git
vcs import < moveit2_tutorials/moveit2_tutorials.repos
for repo in moveit2/moveit2.repos $(f="moveit2/moveit2_$ROS_DISTRO.repos"; test -r $f && echo $f); do vcs import < "$repo"; done
rosdep install -r --from-paths . --ignore-src --rosdistro $ROS_DISTRO -y
## colcon build
cd ~/[ros2 workspace dir]
colcon build --event-handlers desktop_notification- status- --cmake-args -DCMAKE_BUILD_TYPE=Release
## if build dead, add --parallel-workers 1
cd ~/[ros2 workspace dir]/src
git clone https://github.com/cananella/mycobot320_moveit2.git
cp -r mycobot320_moveit2/* ./
rm -rf mycobot320_moveit2 README.md
cd ..
colcon build --packages-select mycobot_moveit mycobot_with_gripper mycobot_ros2_controll hello_moveitros2 launch mycobot_moveit demo.launch.py
ros2 launch mycobot_with_gripper demo.launch.py
if error occurs [ERROR] [launch]: Caught exception in launch (see debug for traceback): 'capabilities'
~/[ros2 workspace dir]/src/moveit2/moveit_configs_utils/moveit_configs_utils/launches.py line:203
change: default_value=moveit_config.move_group_capabilities["capabilities"],
-> default_value=moveit_config.move_group_capabilities,mycobot device permission assignment
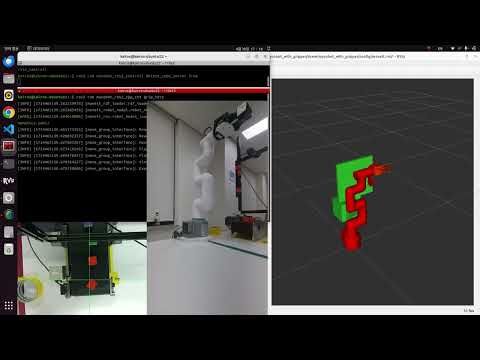
sudo chmod +777 /dev/ttyACM0 launch mycobot controllor
ros2 launch mycobot_ros2_controll rviz_controll.launch.py
run camera service node
ros2 run mycobot_ros2_controll detect_cube_server True
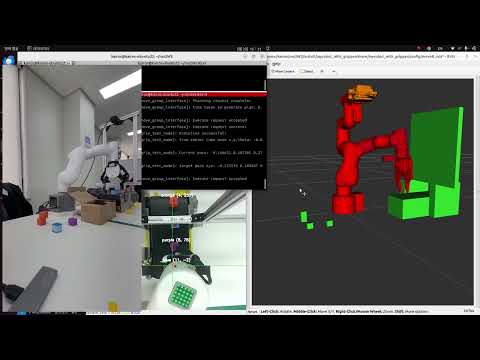
run grip test
ros2 run mycobot_ros2_cpp_cnt grip_test