Control a RC car over the internet!
My friend went on vacation recently. So I made this thing so she can control it halfway across the world




- Was going to use a Arduino Micro Clone but the serial communications for it require installing a CH340 driver that's hard to compile on a Pi. So I went with a full Uno
- I broke the steering gearbox for RC car. So I glued a servo in its place that works well
- Getting actual streaming software on PI is a effort so just sending compressed JPEG images over websockets seemed like a quick and dirty way
- Raspberry PI 3
- Arduino Uno
- Servo (Only if you dont break the steering on your RC car)
- Almost any USB Camera
- Any RC car or The One I Used
- Battery Bank that can do 2.5+ Amps Out

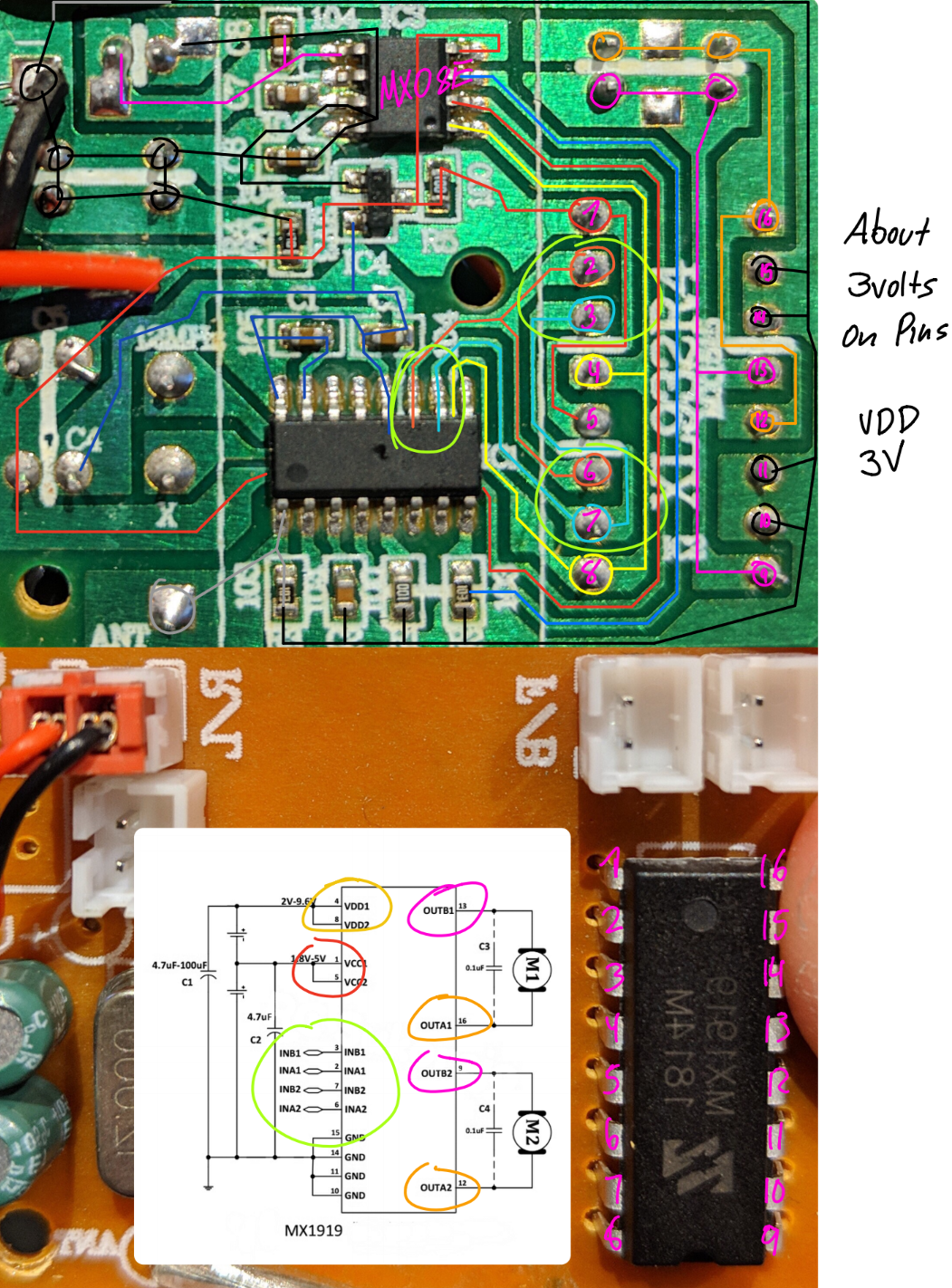
So I followed the traces on the PCB, got the schematic for the motor controller (MX1919) and whipped out the oscilloscope.
The main controller on the PCB was sending 2 basic digital signals at 3v logic to pins 2 and 3 on the MX1919 for foward and reverse
So I slapped two digital ouputs from a Arduino on pins 2 and 3 to take control

Ended up using Node with Express and SocketIO as a relay
npm install express
npm install socketio
sudo apt-get update
sudo apt-get install python3
[make sure its Python 3.4.x]
pip3 install python-socketio
pip3 install asyncio
[OPTIONAL: needed for displaying opencv frames]
sudo apt-get install libgtk2.0-dev pkg-config
[be in the home directory]
sudo apt-get install build-essential cmake pkg-config
sudo apt-get install libjpeg-dev libtiff5-dev libjasper-dev libpng12-dev
sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
sudo apt-get install libxvidcore-dev libx264-dev
sudo apt-get install libgtk2.0-dev libgtk-3-dev
sudo apt-get install libatlas-base-dev gfortran
wget -O opencv.zip https://github.com/opencv/opencv/archive/3.4.1.zip
wget -O opencv_contrib.zip https://github.com/opencv/opencv_contrib/archive/3.4.1.zip
unzip opencv.zip
unzip opencv_contrib.zip
cd ~/opencv-3.4.1/
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D CMAKE_INSTALL_PREFIX=/usr/local \
-D INSTALL_PYTHON_EXAMPLES=ON \
-D OPENCV_EXTRA_MODULES_PATH=~/opencv_contrib-3.4.1/modules \
-D BUILD_EXAMPLES=ON ..
sudo nano /etc/dphys-swapfile
[find and switch out value]
CONF_SWAPSIZE=1024
[restart pi]
[navigate to "opencv-3.4.1/build" directory]
sudo make -j4
[wait forever]
sudo make install
sudo ldconfig
[now we can confirm cv2 python bindings]
ls /usr/local/lib/python3.x/dist-packages
using python3