diff --git a/README.md b/README.md
index 36e5d59..1929e67 100644
--- a/README.md
+++ b/README.md
@@ -7,28 +7,35 @@ NVIDIA-accelerated, deep learned model support for object detection including De
## Overview
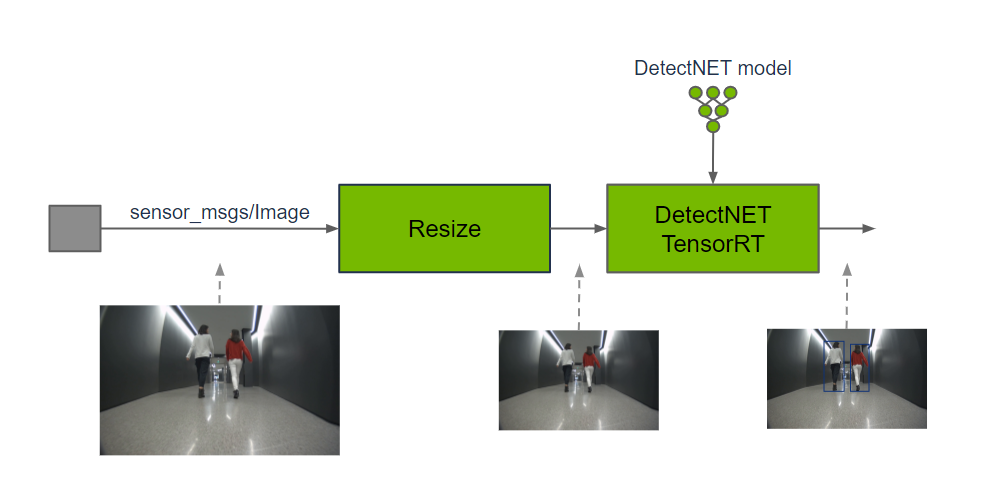
-[Isaac ROS Object Detection](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_object_detection) contains an ROS 2 package to perform object
-detection. `isaac_ros_detectnet` provides a method for spatial
+[Isaac ROS Object Detection](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_object_detection) contains ROS 2 packages to perform object
+detection.
+`isaac_ros_rtdetr`, `isaac_ros_detectnet`, and `isaac_ros_yolov8` each provide a method for spatial
classification using bounding boxes with an input image. Classification
-is performed by a GPU-accelerated
-[DetectNet](https://catalog.ngc.nvidia.com/orgs/nvidia/teams/tao/models/pretrained_detectnet_v2)
-model. The output prediction can be used by perception functions to
+is performed by a GPU-accelerated model of the appropriate architecture:
+
+- `isaac_ros_rtdetr`: [RT-DETR models](https://nvidia-isaac-ros.github.io/concepts/object_detection/rtdetr/index.html)
+- `isaac_ros_detectnet`: [DetectNet models](https://nvidia-isaac-ros.github.io/concepts/object_detection/detectnet/index.html)
+- `isaac_ros_yolov8`: [YOLOv8 models](https://nvidia-isaac-ros.github.io/concepts/object_detection/yolov8/index.html)
+
+The output prediction can be used by perception functions to
understand the presence and spatial location of an object in an image.